智能控制论在项目管理中的应用
时间:2022-09-05 02:08:12

【摘 要】在泛光照明专业分包项目管理实践中,我们面临很多困难,如相关单位众多,有甲方、监理、总包、设计单位、内装、幕墙、外墙GRC或EPS、外墙涂料、园林绿化、商管或物业等相关单位。其中甲方又有工程部、设计部、成本合约部、财务部,总包也有很多部门,有安全部门、物资部们、临时用电管理、土建专业、机电专业等。上述单位及部门都需要我们分包项目管理人员与他们打交道。
【关键词】智能控制;项目管理;应用
在项目实施过程中,分包项目经理遇到的问题众多,有甲方总包的总进度计划会经常变动,很多时候会一再推迟;相关需要穿插配合施工的其它单位的不合作;分包劳动力不稳定,刚培训了一批熟手可能就有人有事走了;公司的资金和设备物资供应不及时不配套,灯具到场了,开关电源没来;诸如此类不胜枚举。
面对复杂的现场情况,专业分包项目经理们经常会忘记项目管理中的某些方面的问题,或者说很难面面俱到的考虑质量、安全、进度、成本、回款等等方面的问题。我们项目经理需要一个提纲挈领的指导思想,在全局的层面指导我们的项目日常管理工作,能够让我们抓住重点,在项目管理的各方面合理分配精力和资源,让我们能够精确计量我们努力的效果。在外地某大型商业地产泛光照明专业分包项目中,我尝试应用智能控制论的原理指导项目管理实践。
首先简要介绍一下智能控制论,人工智能加上自动控制就是智能控制。智能控制系统的概念定义如下:具有拟人、仿生的智能控制特性,并(或)采用人工智能的理论、方法和技术的控制系统。
AI+ACSICS
AI ─ 人工智能
ACS ─ 自动控制系统
ICS ─ 智能控制系统
智能控制系统的特性、功能、行为具有拟人、仿生的智能性,如,自推理、自联想、自学习、自寻优、自协调、自规划、自决策、自感知、自识别、自辨识、自诊断、自预测、自聚焦、自融合、自适应、自组织、自整定、自校正、自稳定、自修复、自繁衍、自进化等。在这里我介绍一下我在昆明红星宜居广场泛光照明项目中应用的智能控制系统----自寻优智能控制系统。
自寻优是具有普遍意义的智能特性,既是生物控制系统特别是人体控制系统、人群控制系统、也是工程控制系统领域许多机器控制系统所追求的控制特性。
人的群体也具有自寻优特性,在昆明红星宜居广场项目中,甲方及各参建单位都希望以最优的状态、最优的方式、最优的过程,实现各自的项目目标,并维护大家的共同利益,这就是人的群体的自寻优特性。但是群体(各参建单位)之间由于各自的目的和利益不同,确实存在矛盾和冲突,尤其是交叉作业时。因而,其各自的自寻优过程中也存在着矛盾和冲突。这时,项目的自寻优过程就会演化成各个单位之间的竞争、对抗、协调过程。这即是大群体中多目的、多目标自寻优过程,或是不同参建单位之间竞争、协调过程。
为了进行自寻优控制,我们需要不断观测被控系统(本项目的施工进程)的运行状态,不断获取环境条件变化的信息,不断搜索被控系统的最优的状态,不断调控现有的系统状态。在项目管理中,我们将甲方及总包制定的项目总施工进度计划为依据,照此制定我们自己的最理想、最优化的泛光照明分包施工进度计划。在施工过程中,我们需要不断对比实际施工进度与计划的差异,找出造成差异的原因,造成差异的原因不外乎内部因素如劳动力不足或者材料物资供应不及时,也可能是外部干扰因素,如与外单位穿插施工配合无序,相关单位进度滞后造成的施工环境条件不具备等。此外,最大的影响来自于总进度计划的调整。总进度计划的调整也就意味着我们分包的施工进度计划要随之调整。也就是我们的自寻优智能控制系统的最优工作点发生了漂移。
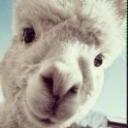
上图中,我们定义的输入代表经过控制器(项目经理)计算过的投入的所有人力物力;输出为项目的成果;被控对象为项目的实时进程;扰动是进程与计划之间的差异;自寻优控制器即是项目管理,对于扰动应用处理策略并发出调整的指令;效应器或称放大器实际代表控制指令对于被控对象的作用程度;感受器接受被控对象的反馈的差异信息并对实际进度和计划进度的差异进行微商。
作为一个参建大型商业地产项目的专业分包商,我们的计划编制必须以总进度计划为纲要,结合我们自己的条件,编制最优化的施工进度计划、劳动力计划、材料机械进场计划。项目实施过程中,扰动是实际进度落后或者赶前于计划的情形,分析扰动的产生原因无外乎内部及外部的原因,落后于计划的内部的原因大都是材料物资供应不及时、劳动力不足或者劳动生产率低下等;外部原因大都是工序穿插配合不顺畅,赶前的扰动主要是分包不能注意与相关交叉施工单位的配合。这是本项目的自寻优智能控制系统中感受器环节需要采集分析并加以处理的信息。
扰动信息传递到自寻优控制器中,自寻优控制器采用变步长的步进式搜索法,远离最优点时用大步长,接近最优点时用小步长,自寻优控制器将应用算法计算过的控制指令发送给效应器。控制器发出的步长指令发送到效应器后,效应器首先确定步长方向及大小,正向步长为实际进度滞后,反向步长指令意味着进度超前;大步长意味着应该较大的力度进行调整,小步长指示调整力度应较小。效应器环节是我们项目管理工作的重点,在机械材料进场进度可以保证的情况下,反向步长就必须根据步长大小相应减少劳动力投入以节约成本,正向步长首先应该努力提高劳动生产率,在提高劳动生产率不足以补偿时,才增加劳动力或者延长劳动时间。同时,在正向步长指令发出后,项目经理应该根据步长大小采取相应强度的对外协调措施,积极消除产生扰动的环境因素。
这个过程经过不断的反馈周而复始,就能使我们的项目管理越来越精细化,能够更合理的分配我们手中的资源。也让我们能够从容应对甲方及总包方的总进度计划的调整,总进度计划的调整使得我们的分包施工进度计划随之调整,也就是最优点的漂移,我们只需调整步长就可以应对了。有了自寻优智能控制系统的科学规划,项目经理可以合理分配精力,更从容、更主动的照管项目管理的方方面面,尤其是很容易被忽略的安全管理和质量管理。
参考文献:
[1]戚安邦主编.项目管理学[M].南开大学出版社,2003
[2]杜栋编著.管理控制论[M].中国矿业大学出版社,2000