基于伺服电机调速的麻面石加工机械控制系统设计
时间:2022-08-04 09:46:40

摘要:本文主要对基于变频调速的麻面石材加工机械控制系统进行改进设计,该系统采用PLC作为控制设备,通过伺服电机对加工石材的气锤进行Y方向短距离移动的快速精确定位,设计主要对三菱PLC和伺服驱动器控制系统的硬件接线、伺服驱动器参数设置和PLC的控制流程做了较详细的论述。系统通过控制面板的三位转换开关进行模式之间的转换,自动模式加工石材,手动模式检测排除故障,回原点模式保证加工过程正常执行,提高了系统的加工效率,达到了设计要求。
关键词:石材加工;PLC;伺服电机;伺服驱动器;控制系统
在实现自动化的生产过程中,石板加工位置的定位要精确,否则会产生大量废品,新的石材应用面越来越广、用量越来越大、质量要求越来越高。大部分的石材加工经过了手工、机械化的生产方式,逐步向自动化、高效化生产模式迈进。分析一些麻面石加工工艺,影响其加工质量的因素主要有一下几点:(1)加工设备的定位问题。位置上的偏差可能会导致加工超出或低于允许范围。(2)加工设备的速度问题。速度上的偏差可能会导致加工出的麻点质地不均匀,成品质量达不到要求。
本设计主要介绍了PLC控制三菱MR-J2-s系列伺服电机调速的麻面石加工系统,以及相应的模式转换和参数计算,依靠脉冲定位的伺服电机不同于一般的变频调速电机,它除了实现调速功能外,还要实现位置、速度、转矩的控制,而且动态特性也常常高于一般的变频调速电机,能让系统具有更高的灵活性和加工精度。
一、系统工作流程
该设计有自动循环和手动控制两个模式,将石块安置到设备的输送位置,如果设定为自动循环,则将控制面板上的控制按时旋钮拨到自动运行,按下自动开始按钮,设备既开始自动加工石材。
以下为自动循环的流程:首先主轴挡板开始下移至石料加工工位,同时皮带轮正向运行,将石块(800*600mm)输送至加工位置。当石料接触到主轴挡板上的限位开关时,1号电机停止,皮带轮不再前进,夹紧装置开始动作。夹紧到位后气锤下移至加工位置,以距两定位面20mm交点为加工原点,气锤下移的同时,喷雾阀门打开,减少了加工石料过程中产生的的粉尘。气锤先对石材做长方向加工,后做短方向加工,长方向加工14次,短方向加工15次。完成后气锤上提回原,同时夹紧装置松开,主轴挡板上提,1号电机再次运作,皮带轮正向运动,将加工好的石块送出,完成一次加工动作,整个加工的控制流程图如图1所示,
图1系统控制流程图
二、Y轴气锤移动电机改进
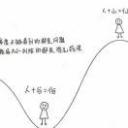
经过分析,锤头按照如图2方式在石块上运动,整个加工工艺的时间最短:
图2 气锤加工走线示意图
因为在Y方向上行走的路程极短,加工一块石板对普通的三相电机来说就需要启停14次,而且由变频器驱动的电机加工的精度也不高,随着运行时间的增加,误差逐渐增大,对石材的质量影响很大,综合之后考虑将原有变频器驱动的电机改进为由伺服电机驱动,当PLC发出相应脉冲频率和个数的脉冲时,电机就转动相应的角度,PLC停止发出脉冲则伺服电机就不转动。经过计算PLC发出脉冲的个数和频率即可对伺服电机进行精确定位,如此设计可提高Y轴气锤加工的精度。
三、强电系统的设计
强电系统是整个控制系统建设的重要组成部分。包括选择安全、可靠的供电电源、良好的配电规划以及有效的接地系统。安全可靠的供配电是保证控制系统有效运行的首要条件。
麻面石加工系统中的强电部分主要是给两台三相异步电动机和一台伺服电机提供电源,其次就是PLC、接触器和一些指示灯的电源,该设计使用三相四线制电源,电源等级为AC380V50Hz。该系统强电电路图如图3所示,
图3 控制系统强电电路图
强电图主要构成如下:(1)入口处的空气开关对整个电路进行保护,三个熔断器分别对三台电机进行过电流保护。(2)利用接触器对电机的启停进行控制,其线圈接入PLC的输出端口,电机的外壳都经过导线接地,同时每台电机都装有短路保护和过载保护。(3)控制系统中1号电机带动的皮带轮输送石块,功率为4KW,不需要反转,因此没有设置反转电路(4)2号电机控制气锤的X轴正反向加工,要求具有较高的控制精度和灵敏度,因此采用变频器驱动,同时用正反转接触器进行控制。(5)加工石块时,要求气锤在Y轴方向上启停频繁,同时为保证气锤工作台的移动速度与加工时间成严格的比例关系,因此该方向上采用伺服电机作为执行电机,伺服电机通过伺服驱动器接入电路,只需要PLC对驱动器的发出信号,驱动器即可对伺服电机进行正反转、转速和旋转角度的控制,所以不需要在强电图中设置正反转电路,另外伺服驱动器也需要接地。(6)从三相中引出L1、L2进行变压,安装熔断器进行保护,为系统提供接触器和安全照明等的电源。(7)之后为变压电路,根据变压器的变比,将380V交流电降压为28V、220V、110V的直流电源,同时安装熔断器保护,28V电压通过桥式整流变为24V直流电为指示灯及照明提供电源,220V接入PLC为其提供电源,110V供接触器工作。
四、PLC与伺服驱动器的相关设置
在该系统中,采用伺服电机对气锤Y轴方向上的加工进行定位,伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,也就是说,脉冲的个数决定了气锤移动的距离,脉冲的频率决定了气锤移动的速度,从而实现位置控制。伺服电机上的旋转编码器具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,伺服电机编码器将该脉冲返回给伺服驱动器,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,就能够很精确的控制电机的转动,从而实现精确的定位。反馈控制示意图如图4所示,
图4 伺服电机反馈控制示意图
在位置控制方式下,反馈脉冲是由光电编码器检测到电机实际所产生的脉冲数,伺服驱动器接收PLC发出的位置指令信号脉冲+方向,送人脉冲列形态,经电子齿轮分/倍频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号对伺服电机进行控制。
1.硬件接线
位置模式下脉冲串输入信号波形为:脉冲+方向信号,PLC与伺服驱动器的接线图如图5,
图5 PLC和伺服驱动器接线
当手动/自动挡开关拨到自动运行模式时,PLC的模式选择位Y07没有输出,伺服驱动器的LOP为OFF状态,伺服系统运行在位置控制模式下,控制气锤的运行和回原。若拨到手动运行模式时,PLC的速度选择位Y07有输出,伺服驱动器的LOP为ON状态,伺服驱动器又运行在速度控制模式下,即可选择相应的点动控制。PLC的Y00端与驱动器的PP端相连,通过控制PLC的Y00发出脉冲的个数及频率控制伺服电机的移动速度和距离;Y02端与驱动器的CR端相连,为脉冲输出端Y00做清零设置,在气锤回原点结束后,令Y02输出一信号,对伺服驱动器进行清零;Y03与驱动器NP端相连,输出为ON时,伺服电机正向运转,为OFF时,伺服电机反向运转。
2.自动模式下Y轴气锤加工的脉冲计算
自动模式下,伺服电机采用位置控制模式,因此Y方向上的加工就需要对PLC发出的脉冲进行计算,已知电机的转轴采用联轴器将与丝杆直接相连,之间没有经过变速装置,丝杆螺距为14mm。每加工一块石料气锤在Y方向上间歇运动14次,总行程为560mm,脉冲当量为10um,则如果要让丝杆转动一个螺距的距离,需要PLC向伺服放大器发出脉冲个数为:
已知三菱MR-J2-super系列伺服电机编码器分辨率为131072,PLC发出的脉冲个数14000与伺服驱动器电子齿轮比 之积等于伺服编码器反馈回的脉冲,可计算伺服驱动器电子齿轮:
由上式得:
因此在伺服放大器中设置电子齿轮分子CMX-No.3为16384分母CDV-No.4为175,气锤在Y方向上每次加工长度为:
需要丝杆转动周数:
需PLC发出脉冲个数:
设定Y轴每次加工0.8秒,则PLC发出脉冲频率为:
因此在自动循环模式中PLC采用相对位置指令FNC158(DRVI)发出脉冲给伺服驱动器,气锤相对当前位置前进相对距离40mm,程序如图6,
图6 Y轴气锤加工程序摘图
3.手动模式的程序设定
在该系统初始化程序中,设置了一旦转换开关被拨到手动挡时,PLC的输出Y07即为ON,此时伺服系统便处于速度控制模式。
图7 手动模式梯形图
手动程序的一开始,7个常闭辅助继电器先将M100接通(逻辑高电平),按下X31手动选择项目按钮一次,使得M10接通,M10常开触点接通指令SFTL(位左移),K7代表M101至M107七个软元件,K1代表每次此指令被接通时,M101、M102、M103、M104、M105、M106、M107的状态右移一位(元件顺序左移一位),同时将M100此时的状态置入M101,M101常闭触点断开,M100被置为0,M101常开触点闭合,接通Y22主轴挡板指示灯,此时即可通过按钮X32、X33对主轴挡板进行上下移动操作。再次按下项目选择按钮X31时,M101的状态右移到M102,点亮夹紧装置指示灯,既可对夹紧装置进行点动操作。直到第六此按下项目选择按钮,此时即选中伺服电机,若按下X32,根据手动模式梯形图7,此时PLC的输出Y04和Y06为ON,Y04表示伺服电机速度模式下正转信号,Y06表示速度模式快速,根据操作人员的点动控制,即可对伺服电机进行前进后退的操作,控制伺服电机反转也是如此。
4.伺服参数设置
由于该系统采用的是伺服电机位置/速度控制模式,当系统自动循环加工石材时,采用位置控制模式,当系统手动运行时,采用速度控制模式,因此在设计时需要对伺服驱动器进行参数的设置,伺服驱动器具体参数的设置如表1所示,
表1 伺服驱动器参数设置
参数代号 参数名称 出厂设置 设定值 说明
NO.0 控制模式选择 0000 0001 设定为速度/位置控制模式
NO.3 电子齿轮分子 1 16384 电子齿轮分子为16384
NO.4 电子齿轮分母 1 175 电子齿轮分子为175
NO.8 内部速度指令1 100 114 设定速度模式下速度1为114RPM
NO.9 内部速度指令2 100 150 设定速度模式下速度2为150RPM
NO.21 功能选择3 000 001 设定为脉冲+方向控制
五、回原程序设计
对于一般加工的设备,系统只能知道其此刻位置相对与以前的位置,为使设备上的任意位置为一固定坐标,需要选一个参考点,这个参考点就是机械原点。
实际上加工前不回机械原点,加工过程中设备没发生过紧停又未断过电,不会影响自动加工的精度。倘若加工中设备断过电,因电机断电后进入自由状态,重新启动设备继续加工时将会偏位。同理,因发生紧停后电机进入自由也会产生颤动,所以紧停解除后继续加工也将出现偏位。开机并回机械原点后,工件坐标相对于机械坐标即确立,加工中发生紧停或设备断过电后,通过重新回机械原点将找回工件坐标系,保证继续加工的精度。
该系统需要的回原点的具体设备有:主轴挡板上提回原,夹紧装置松开,气锤上提之后以Y轴、X轴同时回原。当气锤回到X方向上的原点X15时,立即停止电机2的运动,X方向回原完成。
表2 回原位程序指令
步序 指令 步序 指令
1 STL S1 8 LDI X17
2 LDI X05 9 FNC 156
3 OUT Y44 10 SP 7000
4 LDI Y47 11 SP 2000
5 LDI Y11 12 SP X40
6 LDI X15 13 SP Y0
7 OUT Y41
这里对三菱FX1N晶体管输出型PLC的FNC156进行说明,在该指令中设置气锤Y轴方向原点回归速度为7000Hz(加工速度为5000Hz),当碰到近点行程开关X40时转为爬行速度2000Hz继续回原。直到近点开关由ON变为OFF时,气锤Y轴方向运动立刻停止,即完成了气锤的Y轴回原的操作。为了保证伺服电机的安全,可在原位之后5mm范围内接入另一限位开关,其输出继电器接入伺服驱动器的LSR(后限位)输入点,即当原位限位开关失灵或故障时,气锤回原超过原位到达后限位开关即立刻停止,使系统仍然能工作在正常范围内,同时接通故障报警信号,保证了系统的可靠性。
六、总结
利用三菱FX1N-MT系列PLC可方便的实现对伺服电机位置和速度的控制,控制简单,易于实现,降低了人工的劳动强度和废品率,同时由于采用伺服电机带动气锤的加工和快速回原,设计后的系统克服了传统继电器-接触器控制所具有的接线复杂、体积大、自动化程度低的缺点,不仅使系统定位精确,而且具有更好的灵活性,运行平稳的特点,提高了麻面石材的生产效率。
参考文献
[1]陶可瑞,朱连庆.PLC控制伺服电机应用设计[J].中国高新技术企业.2009,(12).
[2]瞿怀忠.FNC60功能在自动线中的应用[J].内燃机与配件.2000,(1).
[3]杨红波,徐振越等.PLC伺服驱动器控制在飞锯机中的应用[J].机械与电子.2009,(11).
[4]孙军,赵民.桥式切机PLC控制的设计研究[J].石材.1997,(5).
[5]焦志刚,崔瀚等.应用计数器指令实现PLC顺序控制的编程方法[J].工业控制计算机.2010,(8).
[6]张松军.基于PLC和交流伺服控制的卷烟切割系统[J].机电工程技术.2009,(7).
作者简介:杨雨(1988-),男,在读硕士,云南农业大学,主要研究方向为电气自动化;黄兆波(1970-),男,云南省文山人,讲师,硕士,主要从事农业电气化及其自动化方面研究及教学工作。
*基金项目:云南农业大学学生创新基金
注:文章内所有公式及图表请以PDF形式查看。